撰文:胡小凤
出品:车路云50人
随着AI大数据时代的到来,L2+量产智能驾驶产品正逐步进入规模化量产阶段,这一变革无疑给整个智驾产业生态带来了前所未有的机遇和挑战。在这一背景下,车企如何抓住机遇、应对挑战,推动智能驾驶的落地应用,成为了业界关注的焦点。
面对这一关注焦点,长安汽车首席智能驾驶技术官陶吉结合长安汽车的实践,阐述了他对AI大数据时代智能驾驶能力落地的思考。
1、当下自动驾驶发展的两大挑战: 让机器学会开车并不容易,存在很多人擅长、但智驾容易出事故的长尾场景;智驾产业生态亟需重构,存在数据未顺畅流动、资源未充分链接、竞争未有序协调等阻碍。
因此,如何让行业发展更加有序,减少重复造轮子,充分整合行业力量,是当下行业发展的重点工作。
2、在AI技术的驱动下,跨领域和多模态最终拉通的情况下,智驾整体上是场景演进,从功能实现、体验可用、等级提升,最终让汽车成长为智能汽车机器人。
未来智驾的发展方向是,语言大脑和驾驶大脑合为一体,就像专车司机,用户只要告诉它需要去什么地方就好了,剩下的事情完全由智驾搞定。
3、端到端是未来技术的发展方向,在从模块化智驾模型架构走向端到端的过程中,智驾的开发范式发生变化,对于企业核心竞争力的要求发生了变化,数据闭环和快速工程化成为决定车企竞争的关键因素。

从机遇上看,L2+量产智能驾驶产品已经逐渐走向了寻常百姓家,进入规模化量产阶段。
更重要的是,围绕着智能驾驶的话题已经从过去有无的讨论,变成了今天的功能是否好用,比如说辅助泊车功能已经跨越鸿沟,大家开始认为它是一个好用的产品。尤其近期围绕着AEB的争论,正好验证了大家开始关注每一个功能点。
从行业上看,越来越多的人才、资源聚集到了L2+和量产大的赛道。尤其是在乘用车量产方向上,自动驾驶技术的应用将会是全行业最快,数据显示,2025年L2及以上级自动驾驶会达到70%的加载率。在市场竞争压力下,实现技术创新、降本增效,倒逼中国做出了全世界最好用、性价比高的智能化产品,现在大多数主机厂都在强调出海计划,2023年中国整车出口创下了记录,达到了490万辆。
新机遇下也面临着新挑战,陶吉博士认为,当下自动驾驶的发展,主要有以下两大挑战。
一是,让机器学会开车并不容易,存在很多人擅长、但智驾容易出事故的长尾场景。
以高速场景为例,智能驾驶有它擅长的区域,人工驾驶也有他擅长的领域,但二者所擅长的部分并不完全重叠。
因为驾驶员疲劳驾驶、酒驾而产生交通事故,是高速路交通的主流事故。自动驾驶比较擅长通过约定规则方式有效避免事故,人擅长的部分是跟其他车辆意图的交互博弈、以及复杂场景的理解。相反,人工智能去解决复杂的交互博弈还存在问题,这对技术研发和自动驾驶领域技术人员提出了严峻挑战,需要持续攻克。
二是,当下智驾产业生态亟需重构,存在数据未顺畅流动、资源未充分链接、竞争未有序协调等阻碍。
如何让行业发展更加有序,减少重复造轮子,充分整合行业力量,是当下行业发展的重点工作。
比如算法在变,但在一定时间内,对数据的要求是稳定的。BEV面临的问题是不同的车辆、车型,需要不同的传感器搭载,需要补充新数据,但仍有80%的数据是可以复用,每家企业不必单独再去采同样的数据。
长安汽车和多家车企、生态企业建立了数据联盟,通过数据共享的方式,降低获取数据成本,赋能行业发展。同时,产业边界正在重塑,最终到传统主机厂的链条方式,变成了今天的多维或者三角形、多边形的合作方式。芯片厂商也开始往上游的解决方案发展,主机厂走向了更多核心技术的自研。大家都在寻找更好、更能实现多赢的合作方式。
用一张图描绘大模型、或者端到端,在AI发展全景图里处于什么位置。
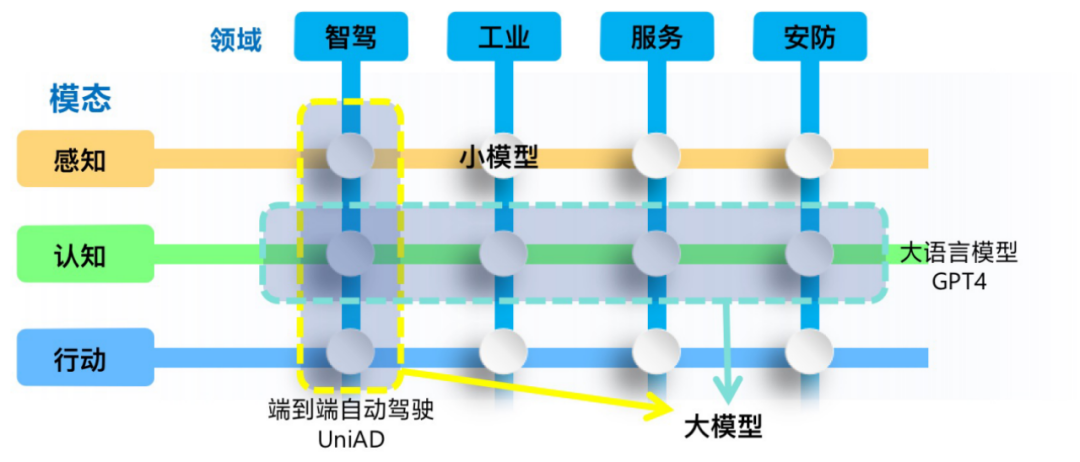
横向是模态划分,纵向是领域划分,AI可以应用在智驾、工业、服务、安防等不同领域,AI的典型要素有感知、认知、行动等,在图中的矩阵交叉下,每一个交叉节点就是过去很多公司在做的小数据、小模型工作。小模型在单一模态内解决问题,比如用感知模态解决工业生产的问题,就是传统的工业视觉检测。
今天的大模型,是单⼀模态打通全领域或单⼀领域拉通全模态。比如大语言模型就是在语言认知模态把横轴拉通,跨不同领域。UniAD则是把纵轴拉通,在驾驶领域把感知认知行动变成端到端,成为垂直领域类的跨模态。
映射到智能驾驶产品和技术的发展,就是从过去小模型在单一模态内解决问题,到今天大模型单⼀模态打通全领域或单⼀领域拉通全模态,未来甚至全领域融汇、感知行贯通,实现类人的能力,智驾产品将走向越来越拟人化的驾驶行为,带来产品和用户体验的提升。
在AI技术的驱动下,跨领域和多模态最终拉通的情况下,智驾整体上是场景演进,从功能实现、体验可用、等级提升,最终让汽车成长为智能汽车机器人。
现在的智能座舱跟智能驾驶本质没有关系,驾驶本身除了响应用户启动的按纽以外,不能主动根据它对环境的认知和用户进行响应和交互,不能提示用户是不是需要做什么事情。
未来智驾的发展方向是,语言大脑和驾驶大脑合为一体,就像专车司机,用户只要告诉它需要去什么地方就好了,剩下的事情完全由智驾搞定。
比如每次开到家门口坑洼路时候,都会压坑,智能驾驶就会注意并且行为发生变化,在每次路过的时候发生智慧偏移,把语言逻辑理解和智能驾驶行为贯通,将会是未来AI给自动驾驶带来的新方向。
在智驾演进过程中,当前业界采用模块化智驾模型架构,所有模块单独设计,Corner case需要大量精力逐个解决,泛化能力弱,因此未来端到端AI大模型架构是向智能汽车机器人演进的必然选择,行业中有很多公司在做相应的尝试和探索。
陶吉认为,端到端一定是未来技术的发展方向,但同时也要对技术的应用保持谨慎乐观。
一方面,端到端技术更多还在开环的模拟器仿真中,或者封闭场地中做验证,还没有完全解决不可控问题。另一方面,端到端只是依靠领域内收集的数据,让行为优化更拟人,但解决不了这个领域内的长尾问题,长尾意味着这个领域内很少碰到这类问题,需要跨领域的能力来支撑,才能走向最终的全无人驾驶。
在从模块化智驾模型架构走向端到端的过程中,智驾的开发范式发生变化,对于企业核心竞争力的要求发生了变化,数据闭环和快速工程化成为决定车企竞争的关键因素。
在数据方面,数据要支撑更好的模型训练,对于人驾驶数据的学习需要高效数据闭环的体系和高质量数据积累。智能驾驶是不断进化的产品,车企所需要掌握数据核心资产,具有快速迭代能力,才能比别人走得更快。
在工程化落地能力方面,智驾产品对性价比的要求越来越高,要求在越来越有限的算力平台上以更低成本实现更多功能。如何把一个好的模型能力部署到车端,也是今天大家面临的挑战。长安汽车已经成立了专门的团队进行模型的优化部署,包括模型推理框架和模型编译,这也是车企能够在未来商业竞争中取胜的关键。
陶吉分享了长安在智能驾驶方面的一些实践。
北斗天枢计划是长安制定的战略方向,已经有智驾产品搭载在深蓝汽车S7智能版上,智驾搭载率将在2024年后快速上升到约100%,实现智驾平权。
依托北斗天枢计划,长安从油车时代开始就先后获得了智能驾驶方面奖项,长安汽车在智驾领域取得“十五个”里程碑式成果,行业持续领先。
重庆特殊的城市环境,让长安拥有持续领先的产品打造环境,得以锤炼最强适应的智驾产品。实现最全道路类型验证覆盖:覆盖超魔幻8D立交、超曲率弯道、超长隧道集群、超陡坡山道的全道路试验验证;最复杂交通环境验证覆盖:在有“黄色法拉利”之称的魔都复杂交通环境下打造最舒适、安全防加塞智驾体验。
从产品设计、人员交互上,长安跟多个高校展开合作,希望能做出更好的人机共驾产品。从产品形态上,瞄准从用户家里、停车场到公司,或者商业场所的停车场全路径,解决日常通勤和高频出行的城区场景电梯口到电梯口领航辅助问题,既突破地图边界限制,又有最强的环境适应性。并在行业内首次应用微碰传感器避免碾压事故,首次引入4D毫米波雷达微多普勒效应检测被车辆遮挡的行人。
目前,长安正在打造SDA新架构,AI重塑新汽车架构,以AI大模型作为横切面对SDA架构进行赋能。L3层融合AI硬件层,提供算力支持和数据采集;L4层融合AI框架层,提供算力调度和推理框架;L5层融合AI算法,提供算法服务;L6层融合AI数据层,提供数据标注和网络训练。
在BEV感知核心技术方面,长安也取得了一定成绩。从过去纯规则驱动,到今天预测和决策AI化。支撑这一切除数据引擎、应用模块开发之外,同时也有一个全生命周期的,从人车到云网路全链条的安全管理,包括公路安全和信息安全的全面布局。
最后,陶吉强调,长安汽车是一个非常开放的生态,长安汽车愿与业界共同推动技术产业应用发展,不断夯实“软硬”基础设施,创新四位一体的“智能合伙人”模式,共同为智能汽车发展添砖加瓦,共同构建智驾生态文明。


